С чем ассоциируется у вас понятие о робототехнике? Согласитесь, воображение рисует нечто, человекоподобное, с механическими руками и ногами, либо, паукообразное, а ещё, обязательно представляется знаменитая собака-робот. Одним словом, представление о роботах у многих достаточно узкое и однобокое.
На самом деле, в современном мире, роботы – довольно востребованы. Их используют в абсолютно различных сферах жизни, о которых многие могут даже не догадываться.
Медицина
Самым удивительным образом роботы спасают человеческие судьбы, а иногда, и жизни. Возможно, вы не догадываетесь, но современные протезы конечностей напрямую связаны с робототехникой. Неподвижные искусственные руки остались в далёком прошлом, нынешние протезы умеют двигать пальчиками. Их управление напрямую связано с электрическими импульсами, передаваемыми телом.
Впрочем, искусственные конечности – не единственная заслуга роботов в медицине. Самые прогрессивные экземпляры умеют проводить высокотехнологичные операции!
Космос
Наверное, ни у кого не возникнет сомнений в том, что космос словно предназначен для обитания роботов. И действительно, если посмотреть на историю освоения космоса, можно увидеть, что большая часть космических исследований легла именно на плечи роботов. Луноход, Марсоход и робот-аватар – наиболее известные из космороботов. На самом деле, их разновидностей достаточно много, все они предназначены для работы в условиях космоса и выполняют действия, которые для человека оказались бы непосильными или крайне опасными.
Системы безопасности
Отлично проявляют себя роботизированные системы в сфере безопасности. Эти роботы первыми обнаруживают пожароопасные ситуации и успешно предотвращают их.
Современные военные учения максимально приближены к условиям реальности, благодаря роботам, имитирующим противника. Роботы для военных учений не отличаются стильным дизайном, но достаточно хорошо имитируют человеческие импульсы и повадки.
Также, роботы способны проводить длительное слежение за объектами, вызывающими подозрение у органов правопорядка.
Производство и быт
Невозможно представить себе современные заводы без роботизированной техники. Роботы выполняют множество самых различных операций. В основном – это действия, требующие многократного повторения и высокой точности. Зачастую применение роботов спасает целые отрасли промышленности. Ведь их применение позволяет значительно увеличить производительность труда, освободив при этом человеческие ресурсы для решения более важных задач.
Отлично применимы роботы и в быту. Самые известные из них – робот-пылесос и газонокосильщик. Также, можно встретить роботов специально разработанных для выполнения более сложных бытовых задач.
Развлечения
Ну и конечно же, никто не отменял роботов, призванных нести людям радость, развлекая их своими умениями. В большинстве своём, такие роботы представляют мир детских игрушек: всевозможные поющие и танцующие животные, интерактивные игрушки, радиоуправляемые машины и вертолёты. Впрочем, роботы для развлечения взрослых отличаются от детских, разве что, размерами.
MH собрал топ-5 роботов со всего мира: от безобидных тренажеров для начинающего робототехника до самых сложных секретных разработок американских ученых. Главным критерием в этом кастинге послужила подобность своему создателю, то есть человеку. Может быть, в далеком будущем они будут спасать людей из огня и делать тебе массаж. А может - поливать все вокруг огнем и отрывать головы. Но это - в будущем. А сейчас они еще маленькие.
Этот малополезный в хозяйстве робот поможет лишь понять сами законы робототехники: какие датчики необходимы железным человечкам, как действуют сервоприводы и массу других интересных вещей. Его рекомендуется покупать начинающим суперзлодеям и механикам-энтузиастам. В наборе, кроме отвертки, ты найдешь 16 приводных модулей, целую систему соединительных механизмов, россыпь светодиодов и количество разномастных датчиков, которое зависит от комплектации. Робот сразу после сборки умеет делать пару простых трюков - остальному ты должен научить его сам через специальную программу. Можно экспериментировать бесконечно не только с действиями робота, но и с самой формой: благодаря уникальной системе соединений он может быть и собакой, и динозавром, и пауком, и всем, на что хватит твоей фантазии. Одно мы знаем точно - жену он тебе не заменит.
Стоимость: от 23 000 рублей

Этот парень уже куда серьезней и подходит для опытных механиков: помимо 16 сервомашинок, комплект включает гироскоп (чтобы держать равновесие), профессиональный софт для программирования и даже инструменты захвата предметов! Этого робота можно обучать самым разным трюкам, но основное его назначение ты ни за что не угадаешь - Bioloid создавался для участия в соревнованиях по робофутболу и робобитвам! Удивительно, но скачет он весьма шустро, и уже обучен основным боевым приемам и ударам по мячу. Инфракрасный датчик играет здесь самую главную роль, ведь именно благодаря ему робот ориентируется в пространстве и распознает мяч и другие объекты. А что он с ними будет делать своими манипуляторами потом - зависит только от твоей фантазии.
Стоимость: от 30 000 рублей
3. Nao

Несмотря на его игрушечные размеры, с этим роботом неподготовленному человеку справиться абсолютно нереально. В маленьком корпусе спрятано огромное количество датчиков, и программируемая система подходит не только для обучающих курсов по робототехнике, но и для различных научных экспериментов. Как утверждают создатели, роботы Nao распознают друг друга, способны общаться на 19 языках и адаптироваться к окружающим условиям. Ориентироваться в пространстве ему помогают сонары-дальномеры, инфракрасные излучатели и приемники, датчики давления и даже 9 тактильных сенсоров. Это значит, что если робота погладить, он скажет тебе спасибо. А если его случайно задеть и уронить, падая, Nao воскликнет с шекспировской патетичностью. При этом тебе достаточно извиниться перед ним - и мир будет спасен от нашествия разъяренных роботов-лилипутов.
Стоимость: около 800 000 рублей
4. Asimo

Этого робота с 80-х годов неустанно совершенствуют ученые концерна Honda. В 2000 году японцы представили его общественности, и Asimo просто взорвал эфиры мировых СМИ - казалось, еще пара лет, и профессия дворника исчезнет как таковая. На деле все оказалось гораздо сложнее: несмотря на огромный потенциал робота, его совершенствуют до сих пор. А умеет он действительно многое: способен идти, бежать (9 км/ч), подниматься по лестнице и даже танцевать (в стиле робо-буги). Руки у Asimo очень ловкие, у каждой - по 14 степеней свободы. Этого достаточно, чтобы налить чай, поднести напитки (балансируя всем корпусом, чтобы не разлить) и даже толкать тележку в магазине, не натыкаясь на других посетителей. В голове у робота есть датчики, своеобразные глаза, благодаря которым он может отслеживать и узнавать человеческие лица и даже понимать язык глухонемых! А это значит, что он поймет твои жесты в субботу утром и принесет холодного пива. Однако купить так просто Asimo нельзя - можно только взять в аренду, причем ни цена аренды, ни ее правила публично не называются.

Это создание было разработано Космическим центром NASA имени Линдона Джонсона (JSC). Так же, как и Атлас, «проект Валькирия» поддерживается агентством DARPA, и это еще одна попытка создать экземпляр, наиболее подходящий для помощи в ликвидации последствий стихийных и техногенных катастроф. Все необходимое для такой работы у нашей девочки есть: она обладает в общей сложности 44 степенями свободы, может крутить головой и торсом и, в отличие от Атласа, работает целый час от батареи. Однако на данный момент разработчики не спешат раскрывать все подробности, и сможет ли Валькирия спасти коня из горящей избы - не понятно. Пока давай полюбуемся ее внешностью: в отличие от конкурентов, этот робот покрыт своеобразной одеждой из легкого пенного материала и тканью. Разработчики утверждают, что сделать «одежду» для робота, которая не ограничивает движения и не мешает доступу к основным узлам, - это отдельный научный процесс. И под него выделили целую лабораторию. Однако даже эти ребята не стали связываться с обувью, предоставив решать эту задачу DC Shoes. И правильно: не понравятся электронной барышне «туфли» - откажется еще человечество спасать.
-
14.06.2006, 15:46
- с жёсткой программой действий;
- манипуляторы, управляемые человеком-оператором;
- с искусственным интеллектом (иногда называемые интегральными), действующие целенаправленно ("разумно") без вмешательства человека.
NesterOff
Робот (чеш. robot, от robota - подневольный труд, rob - раб), машина с антропоморфным (человекоподобным) поведением, которая частично или полностью выполняет функции человека (иногда животного) при взаимодействии с окружающим миром. Первые упоминания о человекоподобных машинах встречаются ещё в древнегреческих мифах. Термин "робот" был впервые введён К. Чапеком в пьесе "R. U. R." (1920), где Роботами называли механических людей. В настоящее время робототехника превратилась в развитую область промышленности: тысячи промышленных роботов работают на различных предприятиях мира, подводные манипуляторы стали непременной принадлежностью подводных исследовательских и спасательных аппаратов, изучение космоса опирается на широкое использование роботов с различным уровнем интеллекта.
С развитием робототехники определились 3 разновидности Роботов:
Большинство современных Роботов (всех трёх разновидностей) - Роботы - манипуляторы , хотя существуют и другие виды Роботов (например, информационные, шагающие и т. п.). Возможно объединение Роботов первой и второй разновидностей в одной машине с разделением времени их функционирования. Допустима также совместная работа человека с Роботами третьего вида (в так называемом супервизорном режиме).
Первые Роботы ("андроиды" , имитировавшие движения и внешний облик человека) использовались преимущественно в развлекательных целях. С 30-х гг. в связи с автоматизацией производства Роботы - автоматы стали применять в промышленности наряду с традиционными средствами автоматизации технологических процессов, в частности в мелкосерийном производстве и особенно в цехах с вредными условиями труда.
Отсюда же можно получить информацию о термине "РОБОТИЗАЦИЯ":
Роботизация
- вытеснение людей из производительного процесса,
с заменой их на автоматизированные и роботизированные станки и производственные линии,
в связи с чем высвобождаются ресурсы для развития сферы услуг.

Промышленный Робот манипулятор имеет "механическую руку" (одну или несколько) и вынесенный пульт управления или встроенное устройство программного управления, реже ЭВМ. Он может, например, перемещать детали массой до нескольких десятков кг в радиусе действия его "механических рук" (до 2 м), выполняя от 200 до 1000 перемещений в час. Промышленные Роботы - автоматы имеют преимущество перед человеком в скорости и точности выполнения ручных однообразных операций. Наиболее распространены Роботы манипуляторы с дистанционным управлением и "механической рукой", закрепленной на подвижном или неподвижном основании. Оператор управляет движением манипулятора, одновременно наблюдая её непосредственно либо на телевизионном экране; в последнем случае. Роботы снабжается "телевизионным глазом" - передающей телевизионной камерой. Часто Робот оснащают обучающейся автоматической системой управления. Если такому Роботу "показывают" последовательность операций, то система управления фиксирует всё в виде программы управления и затем точно воспроизводит при работе. Роботы-манипуляторы используют для работы в условиях относительной недоступности либо в опасных, вредных для человека условиях, например в атомной промышленности, где они применяются с 50-х гг. В 60-х гг. появились подводные Роботы-манипуляторы разнообразных конструкций и назначения: от глубоководных управляемых аппаратов с "механическими руками" (в частности, для захвата образцов породы со дна моря и т. д.) и ползающих по морскому дну платформ с исследовательской аппаратурой до подводных бульдозеров и буровых установок. Подобные манипуляторы применяются и в космонавтике, на американских "Шаттлах".
В конце 60-х гг. в робототехнике возникло новое научное направление, связанное с созданием интеллектуальных Роботов. Такие Роботы имеют датчики очувствления (сенсорную систему), воспринимающие информацию об окружающей обстановке, устройство обработки полученной информации (искусственный интеллект) - специализированную ЭВМ с набором программ - и исполнительные механизмы (моторную систему). Действия интеллектуального Робота обладают некоторыми признаками человеческого поведения: датчики собирают информацию о предметах окружающего мира, их свойствах и взаимодействии; на основе этих данных искусственный интеллект формирует модель внешнего окружения и принимает решение о последовательности действий Робота, которые реализуются исполнительными механизмами. К 1975 интеллектуальные Роботы находились в стадии научных разработок и попыток использования их в промышленности. Работы над искусственным интеллектом проводились также и в НИИ военно-промышленного комплекса.
Робот – это универсальный автомат, позволяющий выполнять механические действия. Его принципиальной особенностью является быстрая оперативная перестройка с одной выполняемой операции на другую. Существует несколько разновидностей роботов и для каждого из них имеется своё определение. Чаще всего говорят о трёх поколениях роботов: промышленных роботах или манипуляторах, адаптивных роботах и роботах с искусственным интеллектом или как говорили раньше – интегральных роботах.
Первые шаги робототехники

Конец 19 и начало 20 столетий характеризуется выдающимися открытиями в области науки и техники. Появились и начали широко применяться различные электрические устройства, генераторы тока, электрические двигатели, аккумуляторы, были изобретены телеграф и телефон. Электрическая энергия начала использоваться всё шире и шире. В начале 20 столетия начали интенсивно развиваться новые науки – радиотехника, электроника. Новые научные открытия и изобретения позволили проблему создания роботов перевести на новый, более совершенный фундамент. Появились реальные возможности оснастить робот зрением – фотоэлементами, слухом – микрофонами, речью – громкоговорителями.

В то же время начали появляться первые плоды науки, которая позже стала называться кибернетикой. Учёные и инженеры начали разрабатывать устройства, которых, хоть и скромно называли кибернетическими игрушками, создавали отнюдь не для развлечения. Они служили примером практического воплощения идей автоматического управления, моделировали поведение живых организмов в простейших ситуациях. Большую известность среди этих кибернетических игрушек приобрели устройства, напоминающие черепах, жуков, белок, собак и др. Первые простейшие схемы таких устройств, способных двигаться в направлении света, разработал основатель кибернетики Н. Винер.
Наибольшую известность приобрели три “черепашки” , созданные английским биофизиком и нейрофизиологом Г. Уолтером в 1950 – 1951 гг. Эти устройства представляют собой самодвижущиеся электромеханические игрушки, способные ползти на свет или от него, обходить препятствия, заходить в “кормушку” для подзарядки разрядившихся аккумуляторов и тому подобное. “Черепашки ” приводятся в движение с помощью двух электродвигателей, питаемых от аккумуляторов. Первый двигатель обеспечивает поступательное движение устройства, второй, расположенный на рулевой колонке, изменяет направление движения. Чувствительными элементами первых двух “черепашек ” Г. Уолтера являются фотоэлемент, расположенный на рулевой колонке, и механический контакт, замыкаемый при наезде на препятствие. Управление поведением осуществляется с помощью несложной электронной схемы с обратной связью. Несмотря на очень простое устройство, “черепашки ” демонстрируют забавные свойства. В темноте или при слабом свете они беспорядочно ползают, как будто что-то ищут. Натыкаясь на препятствие, они сворачивают и пытаются их обойти. Если имеется достаточно сильный источник света, они его скоро “замечают” и решительно направляются в его сторону (положительный тропизм). Однако подойдя к свету слишком близко, они от него отворачиваются (отрицательный тропизм). Теперь они двигаются вокруг источника света, находя для себя оптимальные условия и непрерывно поддерживая их (гомеостазис). Между двумя источниками света “черепашки ” совершают путешествия от одного к другому, наподобие буриданова осла, который, как известно, умер от голода, находясь между двумя одинаковыми копнами сена, не будучи в состоянии выбрать, какой из них вкуснее. Две черепашки “видят” и “узнают” друг друга по зажженной лампочке и ползут друг другу навстречу.
Самые современные роботы
В аптеках Шанхая работают роботы-фармацевты
.
Надо просто нажать на сенсорный экран с описанием симптомов, и робот поставит
диагноз и даст необходимые рекомендации. Дальше остается только предложить
автомату купюру, и лекарство можно забирать.

Роботы-санитары.
Работают в некоторых британских больницах. Роботы производит сухую и влажную
уборку, сами выбрасывают мусор, заправляются чистящими средствами и
подзаряжаются. В отличие от живых уборщиц, никогда не бубнят
под нос и отличаются доброжелательным отношением к окружающим. Встретив кого-то
на своем пути, они извиняются и докладывают, чем они сейчас заняты.

В Южной Корее сконструировали сторожевого робопса для охраны частных усадеб. Пес весит 40 кг, в его нос встроена фотокамера, а в корпусе имеется сотовый телефон, который немедленно посылает сигнал хозяину в случае обнаружения опасности. В критических случаях робот способен сам вызвать полицию.
Робот-фотограф.
Его называют «стоп-кадр» и используют для фотографирования людей на вечеринках и
других мероприятиях. Робот сам выбирает оптимальный ракурс и наводит объектив на
лица. Как правило, 90 процентов снимков, сделанных роботом, оказываются
удачными.

Японский семейный робот
.
Он запоминает до 7 членов семьи и распознает их по лицам или голосу. Словарный
запас – 65 тыс. фраз и 1000 отдельных слов. Он держит в памяти привычки каждого
члена семьи и пытается находить к каждому подход. Он краснеет в ответ на шутку и
бледнеет в замешательстве.
И еще одно изобретения японцев - Рободансер
.
Робот-танцор способен попеременно выдавать диско, панк, фанк, рок, хипхоп, брэйк
и т.д. Заряда батареи хватает на 45 минут. За это время робот предлагает
всевозможные движения для танцующих вокруг людей. В ушах у него стерео
микрофоны, которые улавливают малейшие звуки. В начале следующего года
планируется поставить таких роботов на ведущие дискотеки мира.

Механическая актиния.
Зачем это нужно, непонятно, но робот точно имитируют поведение морской актинии.
У него гибкое силиконовое тело, а пять щупалец чутко реагируют на освещение и
движения внутри и за стеклом аквариума. Напуганный робот-актиния уползает в
угол.
Мисс любезность
.
Это робот – личный помощник, которого можно возить с собой на симпозиумы и
конференции. Робот Грейс самостоятельно нашла дорогу в зал заседаний, не сбив
никого на своем пути, а в зале поприветствовала всех улыбкой и взмахом руки.
Робот постоянно совершенствуется и пополняет свой словарный запас. Грейс уже
может ездить на эскалаторе, понимает несложные фразы и пытается общаться.
Крысы-киборги:
американские ученые вживили микрочип в мозг крыс. Теперь крысами можно управлять
на расстоянии 500 метров. Предполагается, что киборги будут незаменимыми в
поиске людей, оказавшихся под завалами.

Ученые американского университета Карнеги сконструировали робота-старика . Это очень занимательный и милый андроид с чертами старого горемыки из русских народный сказок. Простенькая система интеллекта позволяет роботу сносно общаться с окружающими. При этом он по-старчески шамкает, бубнит что-то под нос, чихает и икает. На расспросы он отвечает, что из семьи пастуха, а главное его изобретение – это плитка шоколада. Наибольший восторг публики робот вызывает, когда просит простить его за старческий маразм.
«Робот – машина. В этом можно не сомневаться, хотя, наверное, некоторые люди будут воспринимать их как домашних животных, ибо такова человеческая природа. Только стандартизация дешёвых роботов общего назначения поможет нам ещё глубже осознать бесконечное разнообразие типов человеческой внешности и поведения. Будем надеяться, что это поможет нам быть терпимее друг к другу». Дж. Янг.
Три закона робототехники для роботов
Первый Закон:
Робот
не может причинить вред человеку или своим бездействием
допустить, чтобы человеку был причинен вред.
Второй Закон:
Робот
должен повиноваться командам человека, если эти команды не
противоречат Первому Закону.
Третий Закон:
Робот
должен заботиться о своей безопасности, поскольку это не
противоречит Первому и Второму законам.
Законы для роботов сформулировал Айзек Азимов в своём произведении "Три закона робототехники (Айзек Азимов)
".
Роботы. Пока еще это экзотика, но тем не менее, они все увереннее входят в нашу жизнь. Три закона роботехники Айзека Айзимова скоро перестанут быть только развлекательной литературой. Роботы – существа, которые одновременно завораживают и пугают своей человечностью и одновременно машинностью. Производство роботов развивается постоянно. Посмотрите на десятку самых интересных экземпляров на сегодняшний день.
ASIMO: Робот-гуманоид

ASIMO – это робот-гуманоид, созданный компанией Хонда. Ростом в 130 сантиметров и весом в 54 килограмма, робот похож на маленького астронавта, который несет рюкзак. Он умеет ходить на двух ногах, копируя человеческую походку скоростью в 6 км/ч. ASIMO был создан в Японии в «Центре исследований и развития» Хонды. Эта последняя модель в серии, а всего их одиннадцать, первый робот был создан в 1986 году.
Официально имя робота – это сокращение от "Advanced Step in Innovative MObility", то есть буквально «Продвинутый шаг в передовой мобильности».в 2002 году существовало 20 роботов ASIMO. Каждый стоит миллион долларов за производство, и некоторые экземпляры можно взять напрокат за 150 тысяч долларов в месяц.
Распознавание движущихся объектов
Используя зрительную информацию, которую собирает вмонтированная в голову робота видеокамера, ASIMO распознает движения множества объектов, а также оценивает расстояние от них и их направление. С помощью комплекса этих технологий робот может следить за перемещениями людей камерой, следовать за человеком или поприветствовать его, когда он приближается.
Распознавание поз и жестов
ASIMO умеет интерпретировать позиции и движения руки, распознавать позы и жесты. Благодаря чему робот может реагировать не только на голосовые команды, но и на естественные телодвижения людей. Таким образом он, например, понимает, когда ему предлагают рукопожатие или когда человек ему машет, и отвечает взаимностью. Кроме того, он понимает, когда ему указывают направление движения.
Распознавание окружающей среды
ASIMO умеет анализировать окружающие объекты и ландшафт и действовать так, чтобы это было безопасно для него и находящихся рядом людей. Например, он узнает потенциально рискованные объекты, такие, как лестницы, а также останавливается или обходит людей и другие движущиеся объекты, чтобы не столкнуться с ними.
Распознавание звуков
Возможности робота распознавать род звуков углубились, и теперь он знает разницу между голосами и прочими звуками. Он отвечает на свое имя, поворачивается лицом к человеку, с которым разговаривает, реагирует на внезапные необычные звуки вроде упавшего предмета или столкновения, и поворачивает голову в этом направлении.
Распознавание лиц
ASIMO может узнавать человеческие лица, даже когда человек двигается. Он может отдельно различать 10 человеческих лиц. Когда их зарегистрируют в его памяти, он будет обращаться к ним по имени.

Albert Hubo: робот-Эйнштейн

Робот Альберт Хубо (Albert HUBO) – андроидный робот. Его внешний вид составляет голова, которая копирует голову ученого Альберта Эйнштейна, и туловище довольно известного гуманоидного робота Хубо. Период разработки составил три месяца и завершился в ноябре 2005 года. Голова была разработана компанией Hanson-Robotics. Тело сделано из специфического материала, Frubber, который частенько используют в Голливуде.
Голова имеет 35 суставов, благодаря чему может выражать различные эмоции на лице, пользуясь независимыми движениями глаз и губ. Также в голове есть две CCD камеры для визуального распознавания. Кроме того, Альберт умеет вытворять все присущие Хубо представления, поэтому возможно выражать еще больше естественных человеческих движений и манер поведения. В теле спрятаны полимерные литиевые батареи, которые обеспечивают около двух с половиной часов автономной работы робота.
С помощью удаленной сети роботом Альбертом можно управлять из внешнего компьютера. Впервые Альберт Хумо был представлен в 2005 году на саммите АПЕК в Пусане (Корея). Его похвалили многие мировые лидеры: президент США, премьер-министр Японии и т.п.

Stanley: самоуправляемое транспортное средство
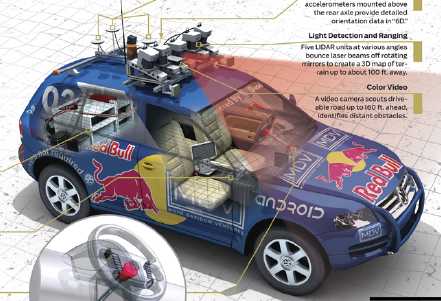
Стэнли (Stanley) – это автономное средство передвижения, созданное гоночной командой Стэнфордского университета. Это обычный Фольксваген Туарег, доработанный до возможности управления только бортовыми компьютерами. Он принимал участие и победил в DARPA Grand Challenge в 2005 году и принес Стаэнфордской гоночной команде приз размером в два миллиона долларов, самый большой денежный приз за всю историю роботов.
Сенсоры, использованные в Стэнли, включают в себя пять лазерных лидаров, пару радаров, стереокамеру и однообъективную камеру. Обрабатывают информацию и определяют позицию машины GPS-приемник, GPS-компас, инерционная система управления, а информацию об одометрии колес получает внутренняя CAN шина Туарега. Компьютерная часть – это шесть мощных компьютеров Intel Pentium M с разными конфигурациями и операционными системами Линукс.
Стэнли наделена системой обнаружения приближающихся препятствий. Данные из лидаров скомбинированы с изображениями из визуальной системы, чтобы составить более полную картину обзора. Если приемлимую дорогу невозможно распознать хотя бы на ближайшие 40 метров, скорость снижается, а лидары ищут безопасный путь.
Кстати, вождение Стэнли программировали, пользуясь записью человеческого вождения в пустыне, а затем устанавливая точное значение каждому биту информации, создаваемой его системой сенсоров. После этой модификации машина-робот начала кататься со скоростью 45 миль в час по дорогам, пересеченным тенями деревьев. Пока точные значения для данных не были заданы, машина испуганно сворачивала с дороги, уверенная, что путь пересечен не тенями, а ямами.

BigDog: робот-мул
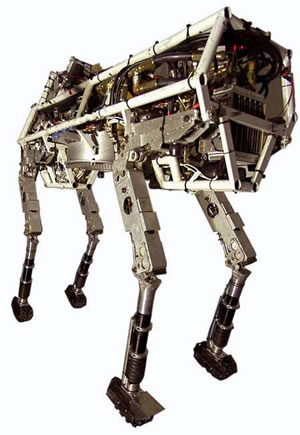
БогДог (BigDog, буквально – Большой Пес) – это четвероногий робот, созданный компанией Boston Dynamics в 2005 году. Проект БигДог финансировало Агентство защиты передовых исследований в надежде, что это создание сможет служить роботом-мулом для солдат на слишком грубой для транспорта местности.
БигДог весит 75 килограммов, он метровый в длину, а в высоты – 0, 7 метра. На данный момент он может путешествовать по тяжелой для передвижения местности со скоростью 5,3 км/ч, нести вес в 54 килограмма и карабкаться по склонам наклоном в 35 градусов.

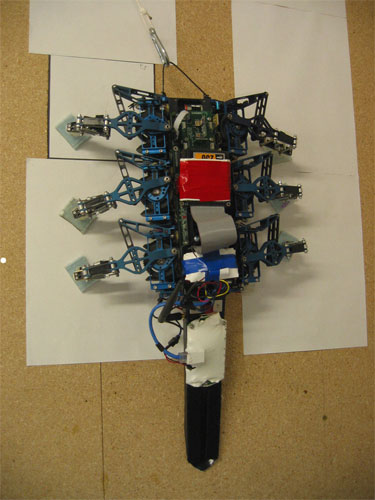
RiSE: карабкающийся робот

Райз (RiSE) – это маленький шестилапый робот, который забирается по вертикальным поверхностям: стенам, деревьям, заборам. На пятках Райза имеются когти, микрокогти или липкий материал, в зависимости от поверхности, по которой надо лазать. Робот меняет позы, чтобы приспособиться к наклону поверхности, а зафиксированный хвост помогает балансировать на крутых поверхностях. Малыш весит всего 2 килограмма, в длину составляет 0,25 метра, бегает со скоростью 0,3 м/с.
Каждая из шести лап робота оснащена двумя электромоторами. Бортовой компьютер управляет лапами, определяет способ коммуникации с землей и обсуживает разнообразные сенсоры. В том числе сенсор, рассчитывающий инертность, сенсор позиции сустава для каждой лапы, сенсор натяжения лап и датчик контакта ступней.
Будущие версии Райза будут использовать сухое прилипание, чтобы карабкаться по совершенно гладким отвесным поверхностям, таким как стекло и металл. Райз разработали совместно исследователи Пенсильванского университета, университетов Карнеги Меллон, Беркли, Стэнфорда, а также университета Льюиса и Кларка. Проект спонсировал Офис защиты науки DARPA.
QRIO: танцующий робот

QRIO ("Quest for cuRIOsity" – «Задача для любопытства») – это двуногий гуманоидный робот для развлечения, созданный и проданный Сони, чтобы не затухал успех их игрушки AIBO (робот-собачка). QRIO обладает ростом в 0,6 метра и весит 7,3 килограмма.
Робот умеет распознавать голоса и лица, благодаря чему может запоминать людей и их пристрастия и антипатии. Он умеет бегать со скоростью 23 см в секунду, что зафиксировано в Книге рекордов Гиннеса (2005 года) как первый, самый скоростной, двуногий робот, который бегает. Робот QRIO четвертого поколения работает от батареи час.
Четвертое поколение этих роботов умеет танцевать под Hell Yes, музыкальный клип исполнителя Beck. Эти экземпляры дополнены третьей камерой на лбу, и у них улучшили руки и запястья. Программисты работали три недели, чтобы обучить этих роботов хореографии.
Рич Уокер демонстрирует роботизированную руку, созданную, чтобы помогать военным, в центре оборонного предприятия в Оксфорде 11 февраля.
Стоматолог демонстрирует использование нового гуманоида по имени Ханако, разработанного инженерами местных университетов Токио. Робот поможет будущим стоматологам на практике. У Ханако есть зубы из твердого пластика, а также реалистичная полость рта, которая может кровоточить и имеет слюноотделение, как у обычного человека. Робот также распознает голоса и речь, так что студенты смогут не только улучшить свои профессиональные способности, но и научиться общаться с пациентами.

Андроид из Южной Кореи по имени “EveR-3″ в традиционном костюме во время выступления в мюзикле в Сеуле 18 февраля. Разработанный в Южной Корее робот, заявленный в пьесе «Принцесса-робот и семь гномов», уже назначен на другие роли в этом году.

Подозреваемый Уоррен Тэйлор лежит на земле, сдавшись роботу у почтового отделения в Витевилле 23 декабря 2009 года. Тэйлор обвиняется в захвате заложников.

Робот-гуманоид без «лица» представлен на крупнейшей выставке роботов в Токио 28 ноября 2009 года. Этот робот в натуральную величину призван помочь студентам-стоматологам. Зовут его «Симроид» (сокращенно от «симулятор» и «гуманоид»). Робот имеет реалистичную кожу, глаза и рот, в который можно поместить копии настоящих зубов, чтобы студенты могли их сверлить. Робот, кстати, умеет плакать, если вдруг лечение пошло не так.

Четвероногий робот по имени БигДог создан, чтобы помогать солдатам носить тяжелое снаряжение в поле.

Робот по имени Робови- II, разработанный японским институтом исследования роботов «ATR», ездит в супермаркете во время «шопингового» эксперимента в Киото 6 января. Робот приветствует покупателя у входа в магазин, а затем следует за ним с корзиной, напоминая о продуктах, которые нужно купить. Эти продукты покупатель заблаговременно вносит списком в специальное устройство в роботе.

Выпускник Массачусетского института технологий Кентон Уильямс проверяет лицо робота по имени Некси 5 марта.

Робот компании «The Shadow Robot» с захватным устройством в руке выполняет задание на мероприятии «Streetwise Robots» в музее науки 6 мая 2008 года в Лондоне. У этого робота есть 40 мышц, которые позволяют ему делать до 24 движений.

На этих фотографиях можно увидеть «кибернетического человека» HRP-4C, который выглядит как обычная японская девушка. Робот выражает различные эмоции: гнев (слева) и удивление (справа).

Капитан Джудит Галлахер из подразделения снайперов демонстрирует противовзрывного робота, известного как ‘Dragon Runner’ во время фотосессии, посвященной военным технологиям, в Лондоне 17 марта. Робот весит 10-20 кг и легко умещается в рюкзаке солдата, к тому же, он может работать на грубых поверхностях.

Робот-учитель английского языка стоит перед детьми в начальной школе Тэджона, в 140 км о тСеула, 11 декабря 2009 года. Роботы-учителя, которые никогда не сердятся и не делают саркастичных замечаний, произвели в некоторых школах Южной Кореи настоящий фурор.

Роботы собирают автомобили «Nissan Patrol» на заводе компании «Nissan Shatai Kyushu Co.» в Канда Тауне, префектура Фукуока, Япония, 24 февраля.

Новый робот японской компании «Kawada Industries» по имени Некстейдж перерезает ленточку вместе с другими официальными лицами на церемонии открытия Международной выставки роботов в Токио 25 ноября 2009 года.

Играющие в футбол роботы на крупнейшей ярмарке технических новинок «CeBIT» 2 марта 2010 года в Ганновере. На ярмарке, проходившей с 2 по 6 марта, свои продукты представляли 4157 компаний из 68 стран.

Американский солдат проходит мимо робота, предназначенного для разминирования объектов, которого назвали в честь мультяшного робота Валли, в лагере Лезернек в провинции Гильменд 10 марта.

Студент инженерного факультета успокаивает ребенка-робота во время презентации в лаборатории университета Цукубы 12 февраля. Робот Ётаро смеется и размахивает ножками, если помахать перед ним погремушкой, но может заплакать и закапризничать, если щекотать его слишком часто.

Работник инженерной компании «Festo» дает гантелю роботу 15 апреля 2007 года в Ганновере накануне технологической ярмарки.

«Луноход-2» (яркая точка наверху слева) и осталенные им следы (слабые, в центре) на поверхности Луны 12 марта 2010 года. Снимок сделан с Лунного орбитального зонда. «Луноход-2» высадился на Луну 15 января 1973 года и проработал почти четыре месяца, преодолев расстояние в 37 км.

Рабочий проходит мимо двурукого робота по имени «Мотоман» японской компании «Yaskawa Electric» во время последних приготовлений к промышленной ярмарке в Ганновере 18 апреля 2008 года.

Солдат наблюдает за роботом-сапером в административном здании в провинции Яла, примерно в 1084 км к югу от Бангкока 18 февраля. Житель местного поселка сообщил полиции о подозрительном коробке на улице. В коробке ничего не оказалось.

Актер Бранч Уоршэм танцует с роботом на генеральной репетиции мюзикла «Роботы» в театре «Барнабе» в Сервионе, недалеко от Лозанны, 22 апреля 2009 года. В мюзикле рассказывается история о человеке, ушедшем в добровольное изгнание с тремя роботами (дворецким, домашним питомцем и танцовщицей), к которому приходит женщина, представляющая собой последнюю связь с человеческим миром.

На этом фото, опубликованным 16 февраля израильской компанией, вы видите средневысотный беспилотный летательный аппарат с большой продолжительностью полета «Heron» для стратегических и тактических миссий. С размахом крыльев до 16,6 метров и стартовым весом в 1250 кг этот самолет может набирать высоту до 9144 метров и может летать до 50 часов без остановки. В данный момент ими пользуются силы коалиции в Афганистане, полагаясь на их способности к разведке и добыче информации в реальном времени, которую они могут доставить прямо командирам и солдатам на передовой линии.

Робот-гуманоид, разработанный специально для того, чтобы привлечь интерес студентов к роботам, представлен на всеобщее рассмотрение профессором института технологии Ниппон Юичи Наказато (вверху справа) в Мияширо 19 декабря 2009 года.

Израильский эксперт по взрывчатым веществам управляет роботом после запланированной детонации взрывчатки на пляже Палмачим к югу от Телль-Авива 3 февраля.

Робот Махру-Зед (справа), разработанный корейским институтом науки и технологии, берет тосты в Сеуле 15 января. Южнокорейские ученые разработали ходячего робота, который может убирать дом, бросать вещи в стиральную машину и даже разогревать еду в микроволновке. На разработку этого робота у института ушло два года. Робот 1,3 метра в высоту и весит 55 кг.

Вид кратера Консепсьон, сделанный с марсохода НАСА «Opportunity» в феврале 2010 года. Консепсьон - молодой кратер, являющийся целью автономного исследования марсоходом «Opportunity». Используя систему автономного исследования, ровер проанализировал снимки на предмет обнаружения черт, больше всего подходящих критериям цели - в данном случае, камни, которые были крупнее и темнее. Затем ровер использовал программу для боле детального обследования предмета с помощью панорамной камеры.

«Ребенок-робот с биомиметрическим телом», или (сокращенно) “CB2″ осматривается в лаборатории в Осаке 30 августа 2007 года. Робот сделан «в образе» настоящего ребенка в возрасте от одного до трех лет, чтобы помочь в изучении вопросов, связанных с развитием детей.

Студент отделения «Imformatics PHD» Себастьян Битцер отжимается рядом с запрограммированным гуманоидом Кондо в здании форума «Imformatics» в университете Эдинбурга 3 сентября 2008 года.

Робот Топио играет в пинг-понг на Междуанродной выставке роботов в Токио 25 ноября 2009 года. Этот двухпедальный робот-гуманоид создан для игры в настольный теннис против людей.

Военный самоходный робот «Крашер» едет по пустыне в Нью-Мехико 19 февраля 2008 года. Этот шестиколесный грузовик весом в 6,5 тонн и пулеметом 50-го калибра на крыше не имеет ни водителя, ни мест для солдат. «Крашер» - это управляемый автоматически автомобиль, который никогда не увидит настоящее битвы.

Ампутированная рука Пьерпаоло Петруцциелло соединена электродами с роботизированной рукой во время эксперимента под названием «Рука жизни» в био-медицинском кампусе университета Рима. Эксперимент проводился, чтобы позволить человеку управлять своими протезами мысленно. В декабре 2009 года группа европейских ученых объявила, что они успешно соединили роботизированную руку с рукой человека - Петруцциелло, который потерял руку в автомобильной аварии. Это позволило ему управлять протезом силой мысли и чувствовать различные импульсы в искусственной руке. Эксперимент длился месяц. Ученые говорят, что это был первый раз, когда человек с ампутированной конечностью мог делать сложные движения, используя мысли для управления биомеханической рукой, присоединенной к его нервной системе.

Рука робота для нового марсохода НАСА согнута почти на 90 градусов. Роботизированная рука проходит испытание в лаборатории по разработке реактивного двигателя в Пасадене, Калифорния. Марсоход получил название «Curiosity» (с англ. «любознательность») и должен быть запущен в октябре 2011 года. Рука со специальными инструментами будет двигаться, чтобы собрать образцы марсианских камней и почвы. Эта рука идентична той, что будет установлена на марсоход «Curiosity».